I hope everyone had a good turkey day and are enjoying “avoid shopping” day today.
In the past I’ve experimented with the process and idea of building separate parts that print assembled, interlocked in some way that when printing is done they will never come apart. And I was somewhat successful with that. but I found the tolerances that needed to be adjusted for made doing this challenging. You want the gap to be just enough that the parts don’t fuse together. Generally 0.2mm gaps are enough. That doesn’t seem like much, but trust me, it’s a lot. It’s enough that tight fits become impossible. Still there’s a lot that can be done within that tolerance.
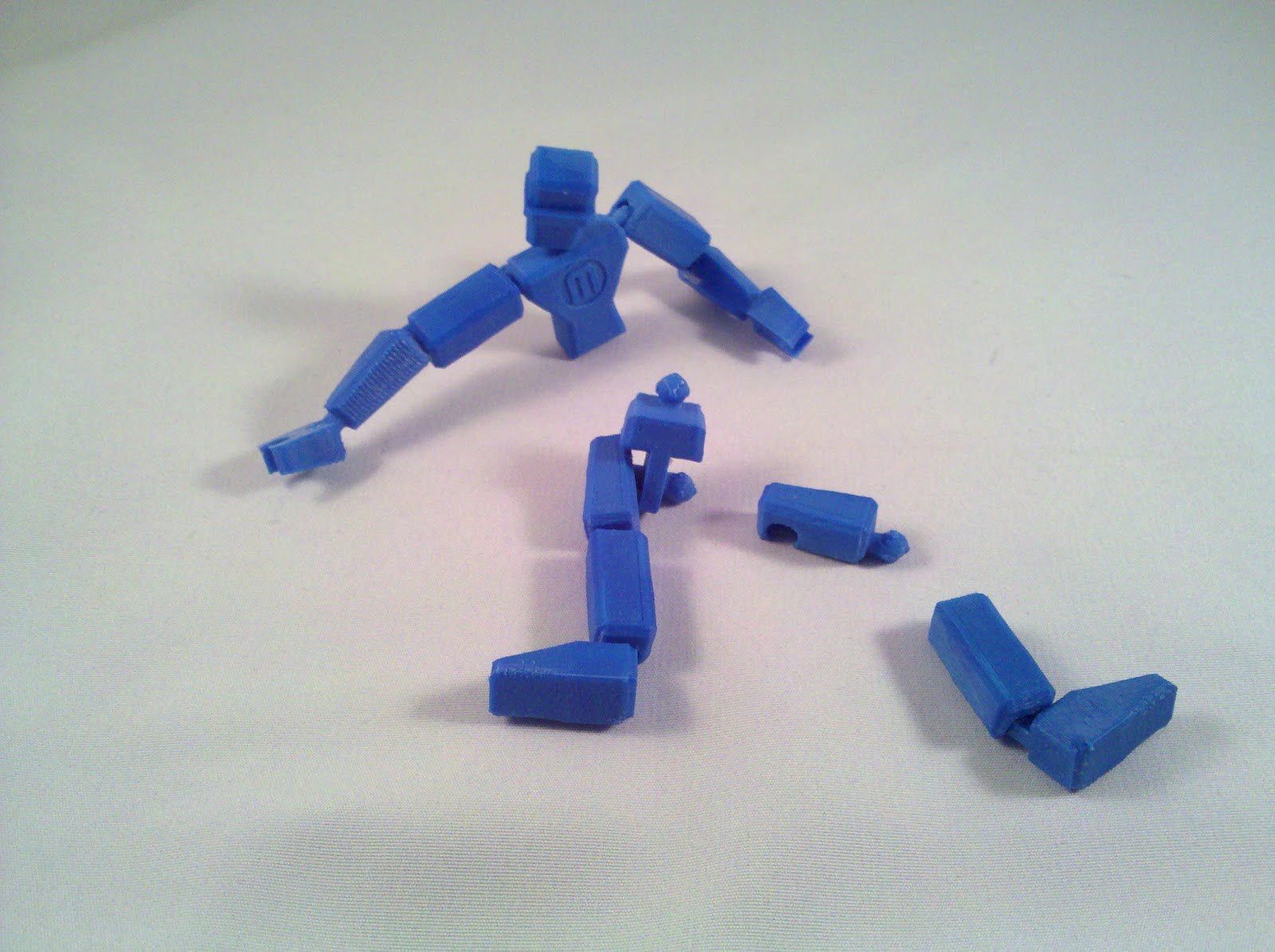
Unfortunately the makerbot man I printed didn’t survive being pulled off the build platform. I’ve got good adhesion now and I guess I wasn’t gentle enough with it’s loose joints. In fact part of him flew into the space behind the Z platform. I’m going to try again and lower my filament diameter a bit to see if I can’t tighten up those joints, along with a more careful extraction.
If you’d like to experiment more with this idea you can check out the concentric spinny thing, the Snake Wluff, the Airport Proof belt Buckle, and of course my own decoder ring. It’s a cool process, but if I tighter fit is desired you need to assemble after print. Ah well, nothing’s perfect.